en een van te voren aangenomen vaste richting, de zgn. nul
richting. Behalve de grootte van dezen hoek Zm, is door het
voortdurend richten tevens de snelheid bekend, waarmede de
zijdelingsche richting naar het doel zich wijzigt; de omwentelings
snelheid van het handrad a is n.l. evenredig met de zijdelingsche
hoeksnelheid.
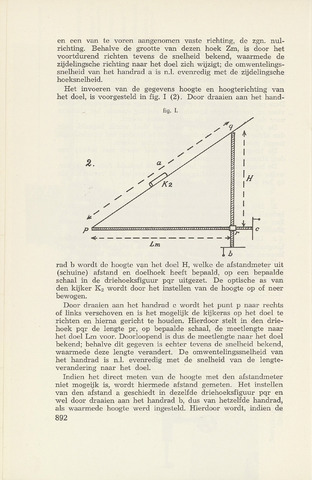
Het invoeren van de gegevens hoogte en hoogterichting van
het doel, is voorgesteld in fig. I (2). Door draaien aan het hand-
Kz
Lm
rad b wordt de hoogte van het doel H, welke de afstandmeter uit
(schuine) afstand en doelhoek heeft bepaald, op een bepaalde
hoogte
en
schaal in de driehoeksfiguur pqr uitgezet. De optische as van
den kijker K2 wordt door het instellen van de hoogte op of neer
bewogen.
Door draaien aan het handrad c wordt het punt p naar rechts
of links verschoven en is het mogelijk de kijkeras op het doel te
richten en hierna gericht te houden. Hierdoor stelt in den drie
hoek pqr de lengte pr, op bepaalde schaal, de meetlengte naar
het doel Lm voor. Doorloopend is dus de meetlengte naar het doel
bekend; behalve dit gegeven is echter tevens de snelheid bekend,
waarmede deze lengte verandert. De omwentelingssnelheid van
het handrad is n.l. evenredig met de snelheid van de lengte
verandering naar het doel.
Indien het direct meten van de hoogte met den afstandmeter
niet mogeijk is, wordt hiermede afstand gemeten. Het instellen
van den afstand a geschiedt in dezelfde driehoeksfiguur pqr en
wel door draaien aan het handrad b, dus van hetzelfde handrad,
als waarmede hoogte werd ingesteld. Hierdoor wordt, indien de
892
fig. I.
mnTTi
{kind=link}